4.6.Quelques méthodes
de tri internes
comparées

Plan
du chapitre:
1.
Complexité d'un algorithme
1.1 Notions de complexité
temporelle et spatiale
1.2 Mesure de la complexité
temporelle d'un algorithme
1.3 Notation de Landau O(n)
2.
Trier des tableaux en mémoire centrale
2.1 Tri interne, tri externe
2.2 Des algorithmes classiques de tri interne
-
Le Tri à bulles
-
Le Tri par sélection
-
Le ri par insertion
-
Le Tri rapide QuickSort
-
Le Tri par tas HeapSort
3.
Rechercher
dans un tableau
3.1 Recherche dans un tableau non trié
3.2 Recherche dans un tableau trié
1. Complexité d'un algorithme
et performance
Nous faisons la distinction entre les méthodes (algorithmes)
de tri d'un grand nombre d'éléments (plusieurs milliers ou
plus), et le tri de quelques éléments (quelques dizaines,
voir quelques centaines ). Pour de très petits nombres d'éléments,
la méthode importe peu. Il est intéressant de pouvoir comparer
différents algorithmes de tris afin de savoir quand les utiliser.
Ce que nous énonçons dans ce paragraphe s'applique en général
à tous les algorithmes et en particulier aux algorithmes de tris
qui en sont une excellente illustration.
1.1 Notions de complexité
temporelle et spatiale
| L'efficacité d'un algorithme est directement liée au
programme à implémenter sur un ordinateur. Le programme va
s'exécuter en un temps fini
et va mobiliser des ressources mémoires
pendant son exécution; ces deux paramètres se dénomment
complexité
temporelle et complexité spatiale. |
Dès le début de l'informatique les deux paramètres
"temps d'exécution" et "place
mémoire" ont eu une importance à peu près égale
pour comparer l'efficacité relative des algorithmes. Il est clair
que depuis que l'on peut, à coût très réduit
avoir des mémoires centrales d'environ 1 Giga octets dans une machine
personnelle, les soucis de place en mémoire
centrale qui s'étaient fait jour lorsque l'on travaillait
avec des mémoires centrales de 128 Kilo octets (pour des gros matériels
de recherche des années 70) sont repoussés psychologiquement
plus loin pour un utilisateur normal. Comme c'est le système d'exploitation
qui gère la mémoire disponible ( RAM, cache, virtuelle etc...),
les analyses de performances de gestion de la mémoire peuvent varier
pour le même programme.
Le facteur temps d'exécution reste l'élément qualitatif
le plus perceptible par l'utilisateur d'un programme ne serait ce que parce
qu'il attend derrière son écran le résultat d'un travail
qui représente l'exécution d'un algorithme.
L'informatique reste une science de l'ingénieur ce qui signifie
ici, que malgré toutes les études ou les critères
théoriques permettant de comparer l'efficacité de deux algorithmes
dans l'absolu, dans la pratique nous ne pourrons pas dire qu'il y a un
meilleur
algorithme pour résoudre tel type de problème. Une méthode
pouvant être lente pour certaines configurations de données
et dans une autre application qui travaille systématiquement sur
une configuration de données favorables la méthode peut s'avérer
être la "meilleure".
La recherche de la performance à tout
prix est aussi inefficace que l'attitude contraire.
Prenons à notre compte les recommandations de R.Sedgewick :
Quels que soit le problème mettez d'abord en oeuvre l'algorithme
le plus simple, solution du problème, car
le temps nécessaire à l'implantation et à la mise
au point d'un algorithme "optimisé" peut être bien plus important
que le temps requis pour simplement faire fonctionner un programme légèrement
moins rapide. |
Il nous faut donc un outil permettant de comparer l'efficacité
ou la complexité d'un algorithme à celle d'un autre algorithme
résolvant le même problème.
1.2 Mesure de la complexité
temporelle d'un algorithme
-
1.2.1 La complexité temporelle
-
1.2.2 Complexité d'une séquence
d'instructions
-
1.2.3 Complexité d'une instruction
conditionnelle
-
1.2.4 Complexité d'une itération
finie bornée
Nous prenons le parti de nous interesser uniquement au temps théorique
d'exécution d'un algorithme. Pourquoi théorique et non pratique
? Parce que le temps pratique d'exécution d'un programme, comme
nous l'avons signalé plus haut dépend :
-
de la machine (par exemple processeur travaillant avec des jeux d'instructions
optimisées ou non),
-
du système d'exploitation (par exemple dans la gestion multi-tâche
des processus),
-
du compilateur du langage dans lequel l'algorithme sera traduit (compilateur
natif pour un processeur donné ou non),
-
des données utilisées par le programme (nature et/ou taille),
-
d'un facteur intrinsèque à l'algorithme.
|
Nous souhaitons donc pouvoir utiliser un instrument mathématique
de mesure qui rende compte de l'efficacité spécifique d'un
algorithme indépendamment de son implantation en langage évolué
sur une machine. Tout en sachant bien que certains algorithmes ne pourront
pas être analysés ainsi soit parce que mathématiquement
cela est impossible, soit parce que les configurations de données
ne sont pas spécifiées d'un manière précise,
soit patrce que le temps mis à analyser correctement l'algorithme
dépasserait le temps de loisir et de travail disponible du développeur
!
Notre instrument, la complexité temporelle, est fondé
sur des outils abstraits (qui ont leur correpondance concrète dans
un langage de programmation). L'outil le plus connu est l'opération
élémentaire (quantité abstraite définie intuitivement
ou d'une manière évidente par le développeur).
Notion d'opération élémentaire
Une opération élémentaire est une opération
fondamentale d'un algorithme si le temps d'exécution est directement
lié (par une formule mathématique ou empirique) au nombre
de ces opérations élémentaires. Il peut y avoir plusieures
opérations élémentaires dans un même algorithme.
Nous pourrons ainsi comparer deux algorithmes résolvant le même
problème en comparant ce nombre d'opérations élémentaires
effectuées par chacun des deux algorithmes.
1.2.1 La complexité temporelle
| est le décompte du nombre d'opérations élémentaires
effectuées par un algorithme donné. |
Décompte du nombre d'opérations élémentaires
effectuées par un algorithme donné
Il n'existe pas de méthodologie systématique (art de l'ingénieur)
permettant pour un algorithme quelconque de compter les opérations
élémentaires. Toutefois des règles usuelles sont communément
admises par la communauté des informaticiens qui les utilisent pour
évaluer la complexité temporelle.
Soient i1 , i2 , ... , ik des instructions algorithmiques
(affectation, itération, condition,...)
Soit une opération élémentaire dénotée
OpElem,
supposons qu'elle apparaisse n1 fois dans l'instruction
i1,
n2 fois dans l'instruction i2, ... nk fois dans l'instruction ik.
Nous noterons Nb(i1) le nombre n1, Nb(i2) le nombre n2 etc. La fonction
Nb (ik ) indiquant le nombre d'opérations élémentaires
dénoté OpElem contenu dans l'instruction algorithmique
ik.
Nb( ) : Instruction -----> Entier
1.2.2 Complexité temporelle d'une séquence
d'instructions
Soit S la séquence d'exécution des instructions
i1
; i2 ; ... ; ik :
Le nombre d'opérations élémentaires OpElem
de S, Nb(S) est égal à la somme des nombres:
n1 + n2 + ... + nk
| S = |
début
i1 ;
i2 ;
... ;
ik
fin |
Donc :
1.2.3 Complexité temporelle d'une instruction conditionnelle
Dans les instructions conditionnelles étant donné qu'il
n'est pas possible d'une manière générale de déterminer
systématiquement quelle partie de l'instruction est exécutée
(le alors ou le sinon), on prend donc un majorant
:
| Cond = |
si Expr alors E1
sinon E2
fsi |
Donc :
| Nb( Cond ) < Nb( Expr) +max
( Nb( E1 ) , Nb( E2 ) ) |
1.2.4 Complexité temporelle d'une itération
finie bornée
Dans le cas d'une boucle finie bornée (comme pour...fpour) contrôlée
par une variable d'indice "i", l'on connaît le nombre exact d'itérations
noté Nbr_d'itérations de l'ensemble des instructions
composant le corps de la boucle dénotées S
(où S est une séquence d'instructions), l'arrêt
étant assuré par la condition de sortie Expr(i)
dépendant de la variable d'indice de boucle i. La complexité
est égale au produit du nombre d'itérations par la somme
de la complexité de la séquence d'instructions
du corps et de celle de l'évaluation de la condition d'arrêt
Expr(i). Lorsque le nombre d'itération n'est pas connu mais seulement
majoré alors on obtient un majorant de la complexité de la
boucle (le majorant correspond à la complexité dans le pire
des cas).
| Iter = |
Itération Expr(i)
S
finItér |
Donc :
| Nb( Iter ) = [ Nb( S) + Nb(Expr(i))
] x Nbr_d'itérations |
Exemple dans le cas d'une boucle pour...fpour :
| Iter = |
pour i<-- a jusquà
b faire
i1 ;
i2 ;
... ;
ik
fpour |
La complexité de la condition d'arrêt est par définition
de 1 (<=> le temps d'exécution de l'opération effectuée
en l'occurence un test, ne dépend ni de la taille des données
ni de leurs valeurs), en notant |b-a| le nombre
exact d'itérations exécutées (lorsque les bornes
sont des entiers |b-a| vaut exactement la valeur
absolue de la différence des bornes) nous avons :
Nb( Iter ) = ( å
Nb(ip) + 1 ) . |b-a|
Lorsque le nombre d'itérations n'est pas connu mais seulement majoré ( nombre noté Majorant_Nbr_d'itérations
), alors on obtient un majorant de la complexité de la boucle (le
majorant correspond à la complexité dans le pire des cas).
Complexité temporelle au pire :
Majorant_Nb( Iter ) = [ Nb( S) + Nb(Expr(i)) ] x Majorant_Nbr_d'itérations
1.3 Notation d Landau O(n)
Nous avons admis l'hypothése qu'en règle générale
la complexité en temps dépend de la taille n des données
(plus le nombre de données est grand plus le temps d'exécution
est long). Cette remarque est d'autant plus proche de la réalité
que nous étudierons essentiellement des algorithmes de tri dans
lesquels les n données sont représentées par
une liste à n éléments. Afin que notre instrument
de mesure et de comparaison d'algorithmes ne dépende pas de la machine
physique, nous n'exprimons pas le temps d'exécution en unités
de temps (millisecondes etc..) mais en unité de taille des données.
Nous ne souhaitons pas ici rentrer dans le détail mathématique
des notations O(f(n)) de Landau sur les infiniments grands
équivalents, nous donnons seulement une utilisation pratique de
cette notation :
Pour une fonction f (n) dépendant de la variable n, on
écrit :
f est O(g(n)) g(n) où g est elle-même une fonction de la
variable entière n, et l'on lit f est de l'ordre de grandeur
de g(n) ou plus succinctement f est d'ordre g(n), lorsque :
| pour tout valeur entière de n, il existe deux constantes
a et b positives telles que
a.g(n) < f(n) < b.g(n) |
Ce qui signifie que lorsque n tend vers l'infini (n devient
très grand en informatique) le rapport f(n)/g(n) reste
borné.
Exemple :
f(n) = 3n² - 7n +4
g(n) = n²
Lorsque n tend vers l'infini le rapport f(n)/g(n)
tend vers 3, il est donc borné.
f(n)/g(n) ¾®
3 quand n ¾® ¥
,
donc f est d'ordre n² ou encore f est O(n²) |
C'est cette notation que nous utiliserons pour mesurer la complexité
temporelle C en nombre d'opérations élémentaires d'un
algorithme fixé. Il suffit pour pouvoir comparer des complexités
temporelles différentes, d'utiliser les mêmes fonctions g(n)
de base. Les informaticiens ont répertorié des situations courantes
et ont calculé l'ordre de complexité associé à
ce genre de situation.
Les fonctions g(n) classiquement et pratiquement
les plus utilisées sont les suivantes :
| Ordre de complexité C |
Cas d'utilisation courant |
| g(n) = 1 Þ C est O(1) |
Algorithme ne dépendant pas des données |
| g(n) = log (n) Þ C
est O(log(n)) |
Algorithme divisant le problème par une quantité constante
(base du logarithme) |
| g(n) = n Þ C
est O(n) |
Algorithme travaillant directement sur chacune des n données |
| g(n) = n.log(n) Þ C
est O(n.log(n)) |
Algorithme divisant le problème en nombre de sous-problèmes
constants (base du logarithme), dont les résultats sont réutilisés
par recombinaison |
| g(n) = n² Þ C
est O(n²) |
Algorithme traitant généralement des couples de données
(dans deux boucles imbriquées). |
2.
Trier des tableaux en mémoire centrale
Un tri est une opération de classement d'éléments
d'une liste selon un ordre total défini. Sur le plan pratique,
on considère généralement deux domaines d'application
des tris: les tris internes et les tris externes.
Que se passe-t-il dans un tri? On suppose qu'on se donne une suite de
nombres entiers (ex: 5, 8, -3 ,6 ,42, 2,101, -8, 42, 6) et l'on souhaite
les classer par ordre croissant (relation d'ordre au sens large). La suite
précédente devient alors après le tri (classement)
: (-8, -3, 2, 5, 6, 6, 8, 42, 42, 101). Il s'agit en fait d'une nouvelle
suite obtenue par une permutation des éléments de la première
liste de telle façon que les éléments résultants
soient classés par ordre croissant au sens large selon la relation
d'ordre totale " £ " : (-8 £
-3 £ 2 £
5 £ 6 £
6 £ 8 £ 42
£
42
£
101).
Cette opération se retrouve très souvent en informatique
dans beaucoup de structures de données. Par exemple, il faut établir
le classement de certains élèves, mettre en ordre un dictionnaire,
trier l'index d'un livre, etc...
2.1 Tri interne, tri externe
Un tri interne s'effectue sur des données stockées
dans une table en mémoire centrale, un tri externe est relatif
à une structure de données non contenue entièrement
dans la mémoire centrale (comme un fichier sur disque par exemple).
Dans certains cas les données peuvent être stockées
sur disque (mémoire secondaire) mais structurées de telle
façon à ce que chacune d'entre elles soitreprésentée
en mémoire centrale par une clef associée à un
pointeur. Le pointeur lié à la clef permet alors d'atteindre
l'élément sur le disque (n° d'enregistrement...). Dans
ce cas seules les clefs sont triées (en table ou en arbre) en mémoire
centrale et il s'agit là d'un tri interne. Nous réservons
le vocable tri externe uniquement aux manipulations de tris directement
sur les données stockées en mémoire secondaire.
2.2 Des algorithmes classiques de tri interne
Dans les algorithmes référencés ci-dessous, nous
notons (a1, a2, ... ,
an) la liste à
trier. Etant donné le mode d'accès en mémoire centrale
(accès direct aux données) une telle liste est généralement
implantée selon un tableau à une dimension de n éléments
(cas le plus courant).
Nous attachons dans les algorithmes présentés, à
expliciter des tris majoritairement sur des tables, certains algorithmes
utiliserons des structures d'arbres en mémoire centrale pour représenter
notre liste à trier (a1, a2, ... ,
an).
Les opérations élémentaires principales les plus
courantes permettant les calculs de complexité sur les tris, sont
les suivantes :
-
la comparaison de deux éléments de la liste ai
et ak , (si ai
> ak, si ai
< ak,....)
-
l'échange des places de deux éléments de la liste
ai
et ak , (place(ai ) <=>
place( ak)).
Ce sont ces opérations qui seront utilisées pour fournir
une mesure de comparaison des tris entre eux.
Tris sur des tables : (suivez l'hyperlien
pour consulter la page d'information du tri concerné)
Tris sur un arbre binaire : (suivez
l'hyperlien pour consulter la page d'information du tri concerné)
3.
Rechercher dans un tableau
Les tableaux sont des structures statiques contigües, il est facile
de rechercher un élément fixé dans cette structure.
Nous exposons ci-après des algorithmes élémentaires
de recherche utilisables dans des applications pratiques par le lecteur.
Essentiellement nous envisagerons la recherche séquentielle qui
convient lorsqu'il y a peu d'éléments à consulter (quelques
centaines), et la recherche dichotomique dans le cas où la liste
est triée.
3.1 Recherche dans un tableau non trié
Algorithme de recherche séquentielle
:
-
Soit t un tableau d'entiers de 1..n éléments
non rangés.
-
On recherche le rang (la place) de l'élément Elt dans
ce tableau. L'algorithme renvoie le rang (la valeur -1 est renvoyée
lorsque l'élément Elt n'est pas présent dans
le tableau t)
|
Nous proposons au lecteur 4 versions d'un même algorithme de recherche
séquentielle. Le lecteur adoptera une de ces versions en fonction
des possibilités du langage avec lequel il compte programmer sa
recherche.
Version Tantque avec "et alors" (si le langage dispose
d'un opérateur et optimisé)
i ¬
1 ;
Tantque (i £
n) et alors (t[i] ¹ Elt) faire
i ¬ i+1
finTant;
si i £
n alors rang ¬ i
sinon rang ¬
-1
Fsi |
Version Tantque avec "et" (opérateur et non optimisé)
i ¬
1 ;
Tantque (i <
n)
et
(t[i] ¹ Elt) faire
i ¬ i+1
finTant;
si t[i] = Elt
alors
rang ¬ i
sinon rang ¬
-1
Fsi |
Version Tantque avec sentinelle en fin de tableau (rajout d'une
cellule + opérateur et optimisé)
t[n+1] ¬
Elt ; // sentinelle rajoutée
i ¬
1 ;
Tantque (i £
n) et alors (t[i] ¹ Elt) faire
i ¬ i+1
finTant;
si i £
n alors rang ¬ i
sinon rang ¬
-1
Fsi |
Version Pour avec instruction de sortie (conseillée si
le langage dispose d'un opérateur Sortirsi)
pour i ¬
1 jusquà n faire
Sortirsi
t[i] = Elt
fpour;
si i £
n alors rang ¬ i
sinon rang ¬
-1
Fsi
|
3.2 Recherche dans un tableau trié
Spécifications d'un algorithme
séquentiel :
-
Soit t un tableau d'entiers de 1..n éléments
rangés
par ordre croissant par exemple.
-
On recherche le rang (la place) de l'élément Elt dans
ce tableau. L'algorithme renvoie le rang (la valeur -1 est renvoyée
lorsque l'élément Elt n'est pas présent dans
le tableau t) On peut reprendre sans changement les versions
de l'algorithme de recherche séquentielle précédent
travaillant sur un tableau non trié.
-
Complexité moyenne en O(n)
|
On peut aussi utiliser le fait que le dernier élément
du tableau est le plus grand élément et s'en servir
comme une sorte de sentinelle. Ci-dessous deux versions utilisant
cette dernière remarque.
Version Tantque
si t[n] <
Elt alors rang ¬ -1
sinon
i ¬
1 ;
Tantque t[i] <
Elt faire
i ¬ i+1
finTant;
si t[n] =
Elt alors rang ¬ i
sinon
rang ¬ -1
Fsi
Fsi |
Version pour
si t[n] <
Elt alors rang ¬ -1
sinon
pour i ¬
1 jusquà n-1 faire
Sortirsi
t[i] ³ Elt
fpour;
si t[n] =
Elt alors rang ¬ i
sinon
rang ¬ -1
Fsi
Fsi |
Spécifications d’un algorithme
dichotomique :
-
Soit t un tableau d'entiers de 1..n éléments
rangés
par ordre croissant par exemple.
-
On recherche le rang (la place) de l'élément Elt dans
ce tableau. L'algorithme renvoie le rang (la valeur -1 est renvoyée
lorsque l'élément Elt n'est pas présent dans
le tableau t). Au lieu de rechercher séquentiellement
du premier jusqu'au dernier, on compare l'élément
Elt à chercher au contenu du milieu du tableau.
Si c'est le même, on retourne le rang du milieu, sinon l'on recommence
sur la première moitié (ou la deuxième) si l'élément
recherché est plus petit (ou plus grand) que le contenu du milieu
du tableau.
-
Complexité moyenne en O(log(n))
|
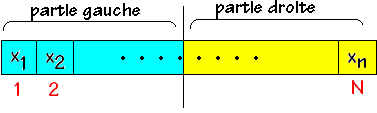
Soit un tableau au départ contenant les éléments
(x1, x2, ... , xn)

On recherche la présence de lélément x dans ce
tableau. On divise le tableau en 2 parties égales :
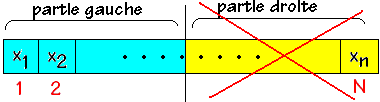
Soit x est inférieur à l' élément milieu
et s'il est présent il ne peut être que dans la partie gauche,
soit x est supérieur à l' élément milieu
et s'il est présent il ne peut être que dans la partie
droite. Supposons que x < milieu nous abandonnons la partie droite et
nous recommençons la même division sur la partie gauche :
On redivise la partie gauche en deux parties égales avec un nouveau
milieu :
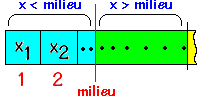
Si x < milieu c'est la partie gauche qui est conservée sinon
c'est la partie droite etc ...
Le principe de la division dichotomique aboutit à la fin à
une dernière cellule dans laquelle soit x = milieu et x est présent
dans la table, soit x ¹ milieu et
x n'est pas présent dans la table.
Version itérative de cet algorithme
| bas, milieu, haut, rang
: entiers
bas ¬
1;
haut ¬
N;
Rang ¬
-1;
repéter
milieu
¬
(bas + haut) div 2;
si
x = t[milieu] alors
Rang ¬
milieu
sinonsi
t[milieu] < x alors
bas ¬
milieu + 1
sinon
haut ¬
milieu-1
fsi
fsi
jusquà ( x =
t[milieu] ) ou ( bas > haut )
|
Voici en Pascal une procédure traduisant la version itérative
de cet algorithme :
procedure dichoIter(x:Elmt; table:tableau; var rang:integer);
{recherche dichotomique par itération
dans table rang =-1 si pas trouvé}
var
milieu:1..max;
g,d:0..max+1;
begin
g := 1;
d := max;
rang := -1;
while g <= d do
begin
milieu := (g+d) div 2;
if x = table[milieu] then
begin
rang := milieu;
exit
end
else
if x < table[milieu] then
d := milieu-1
else g := milieu+1
end;
end;{dichoIter}
|
Dans le cas de langage de programmation acceptant la récursivité
(comme Pascal ), il est possible d'écrire une version récursive
de cet algorithme dichotomique.
Voici en Pascal une procédure traduisant la version récursive
de cet algorithme :
procedure dichoRecur(x:Elmt;table:tableau;g,d:integer;var rang:integer);
{ recherche dichotomique récursive
dans table
rang =-1 si pas trouvé.
g , d: 0..max+1 }
var
milieu:1..max;
begin
if g<= d then
begin
milieu := (g+d) div 2;
if x = table[milieu] then rang :=
milieu
else
if x < table[milieu] then
// la partie gauche est conservée
dichoRecur(
x, table, g, milieu-1, rang )
else // la
partie droite est conservée
dichoRecur(
x, table, milieu+1, d, rang )
end
else rang := -1
end;{dichoRecur}
|